



产品展示
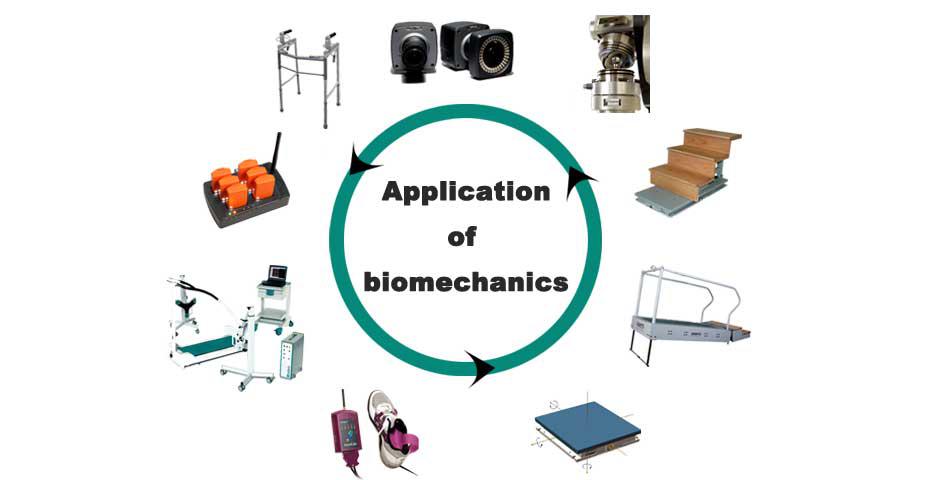
- 生物力学实验室建设
- 生理学实验室建设仪器设备
- 心理学实验室建设仪器设备
- 神经学/脑科学研究仪器
- 训练/康复/医疗
- 人机工程/人因工程环境建设
- 人因工程/人机工效测评分析
- 人因工程测量仪
-
传感器系列
-
应力应变测试系统
经典案例



RoboTouch机器人触觉测量系统
RoboTouch机器人触觉测量系统
RoboTouch机器人触觉测量系统可检测、识别物体的形状、位置和姿态等。机器人触觉测量系统使机器人更智能、更精密——除了听觉、视觉、味觉之外,机器人又有了触觉。该系统广泛用于仿生机器人(四足、六足机器人、无人机、机器蛇等)、仿人机器人、医疗机器人研究及应用。是高校、科研院所、研究所、医院理想的科研和教学平台。
智能机器人是具有思维、感知和行动功能的机器,其感知系统是实现机器人智能和自主行动的基础,因此感知技术的研究受到了人们的极大重视。智能机器人最重要的感知功能是视觉和触觉.视觉使得机器人高效地完成环境信息获取、理解和景物分析任务,包括对象的检测、识别、识别物体的形状、位置和姿态等,美国SynTouch公司的传感器被设计成能模拟人类指尖,可以探测力、震动和温度。配置这种传感器的机器人将这些信息组合就可以从金属中识别出玻璃。这种反馈的方式被“阴影之手”的制作者所接受,它成为世界上最灵巧的机械手之一。



系统特点介绍:
1、基于Barrett Hand3D模型的传感器;
2、系统共用了7个传感器垫(手掌、指中、指尖);
3、每一个独立的感应垫用电容性压力传感技术构造;
4、每个传感器的数据通过一个专有的PSoC和I²C进行数据输出,确保了触觉应用时的高灵敏度;
5、可与用户的应用相结合或通过USB数据整合工具进行连接;
6、可作为一个基本的工具包或完全集成的解决方案。


系统类型:
1、1个10x10mm手掌传感器(24个传感元件);
2、3个6x6mm指中传感器(24个传感元件);
3、3个6x6mm指尖传感器(22个传感元件)。
系统配置:
一、RT Basic 版:
- 7个适应 Barrett Hand3D 模型的传感器
- 一个 API 库(方便客户自定义安装)
- 可单独提供一个包含可视化软件的数据采集工具包
二、RoboTouch 完整版:
- RoboTouch 基础版
- 数据采集工具包和保护套装
 沪公网安备 31011702003229号
沪公网安备 31011702003229号